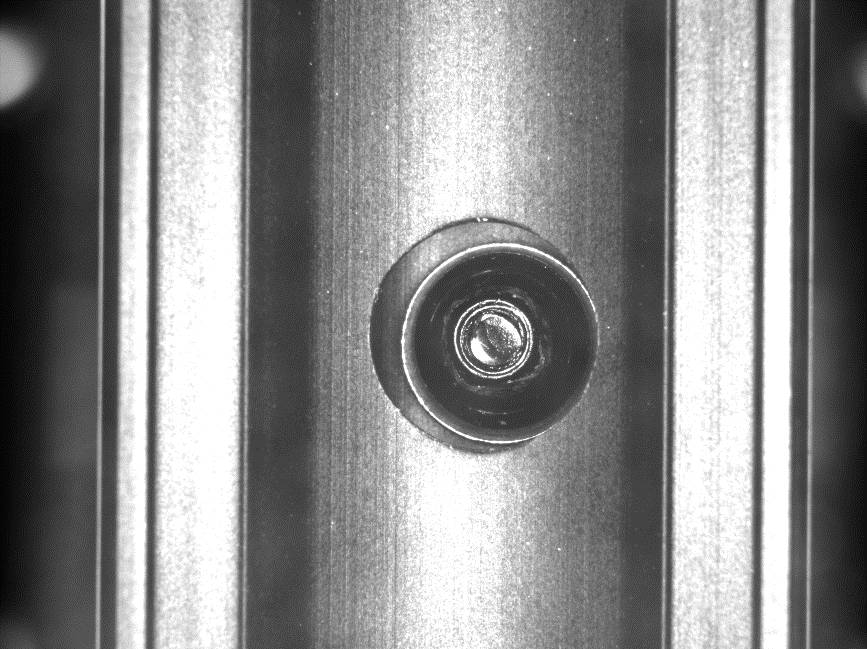
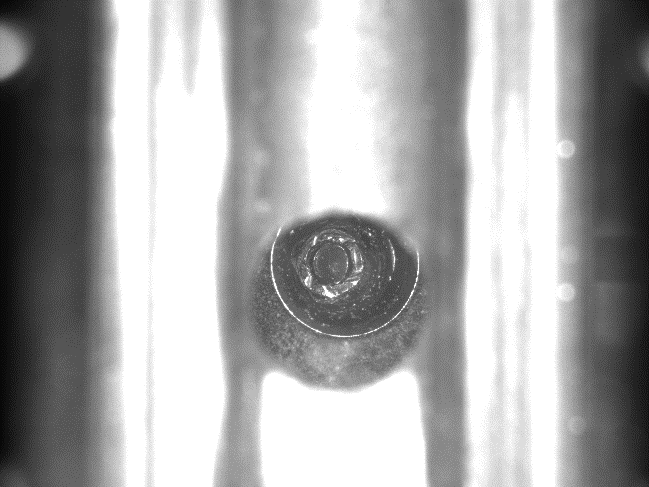
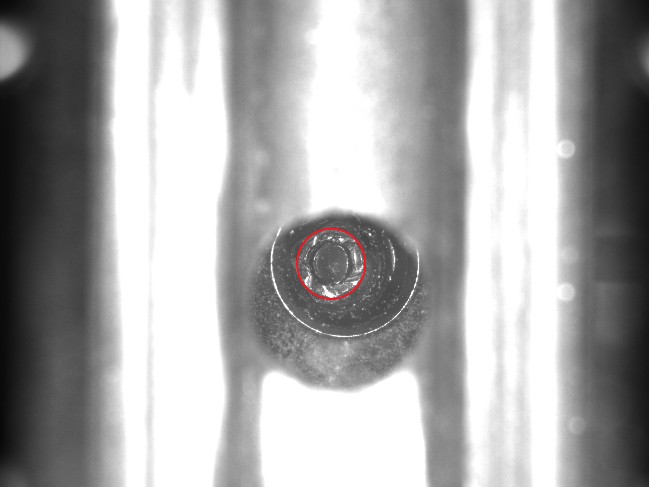
Sistem je bio dizajniran da precizno nadje poziciju zavrtnja. Ova pozicija se koristi za navodjenje uredjaja za nanošenje lepka.
Zbog zahtevane prezicnosto od 0.1 mm korisćeno je telecentrik objektiv sa specijalnim osveljenjem.
Broj varijanti delova koje se kontrolišu je veliki (preko 50) dok je program za nalaženje morao da bude univerzalan. Nijedno standardno rešenje nije moglo da da zadovoljavajuće rezultate i zbog toga je napravljen ‘custom pattern matching’.
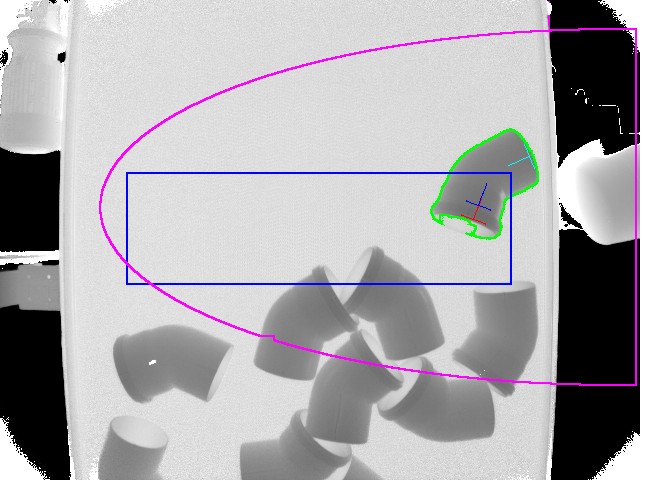
Sistemi navodjenja – Primer 2 – 3D navodjenje
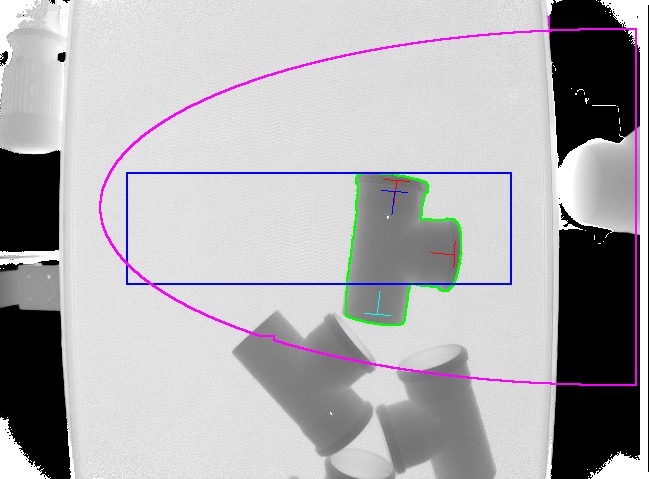
Svrha sistema je pronalaženje pozicije i orientacije dela kako bi on mogao da bude uzet pomoću robota. Na slici levo se nalazi slika vizualizacije nalaženja dela koji je potrebno pokupiti sa šesto-osnim robotom.
Takodje je potrebno prilagoditi podatke nalaženja fizičkim mogućnostima robora.
Za ovu aplikaciju je korišćen Lucid ToF kamera Helios2 pri čemu je hvatanje dela bilo realizovano sa KUKA industrijskim robotom.
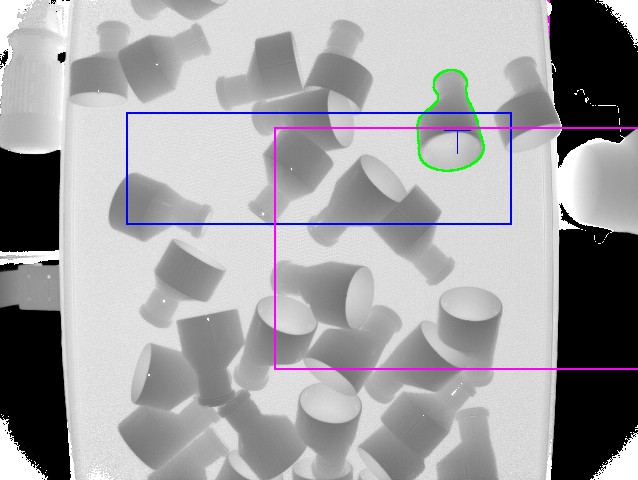
Sistem pre svakog uzimanja prikupi sliku sa kamere i nadje slobodan deo za uzimanje. Sistem na jednostavan način omogućava stvaranje složenih radnih prostora robota.
Prosečno vreme akvizicije slike je 600 ms, dok je prosečno vreme nalaženja dela 700 ms. Tačnost nalaženja je +- 2 mm po bilo kojoj osi.
Jedan od glavnih problema ovih tipa aplikacije je mogučnost delova da se fizički povežu i uzimanje takvih delova dovodi do kolizije robota sa okolinom.
Naš softver za 3D navodjenje ima proveru da li su delovi fizički spojeni i ova mogućnost izdvaja naš sistem u odnosu na ostale na tržištu. Takodje ima deterministički algoritam za proveru da li nadjen deo ima pravilnu orijentaciju.